publications
* indicates co-first author
-
 GrowSplat: Constructing Temporal Digital Twins of Plants with Gaussian SplatsIn 2025 IEEE 21st International Conference on Automation Science and Engineering (CASE), 2025
GrowSplat: Constructing Temporal Digital Twins of Plants with Gaussian SplatsIn 2025 IEEE 21st International Conference on Automation Science and Engineering (CASE), 2025 -
 Energy Efficient Planning for Repetitive Heterogeneous Tasks in Precision AgricultureIn IEEE International Conference on Robotics and Automation (ICRA), 2025
Energy Efficient Planning for Repetitive Heterogeneous Tasks in Precision AgricultureIn IEEE International Conference on Robotics and Automation (ICRA), 2025 -
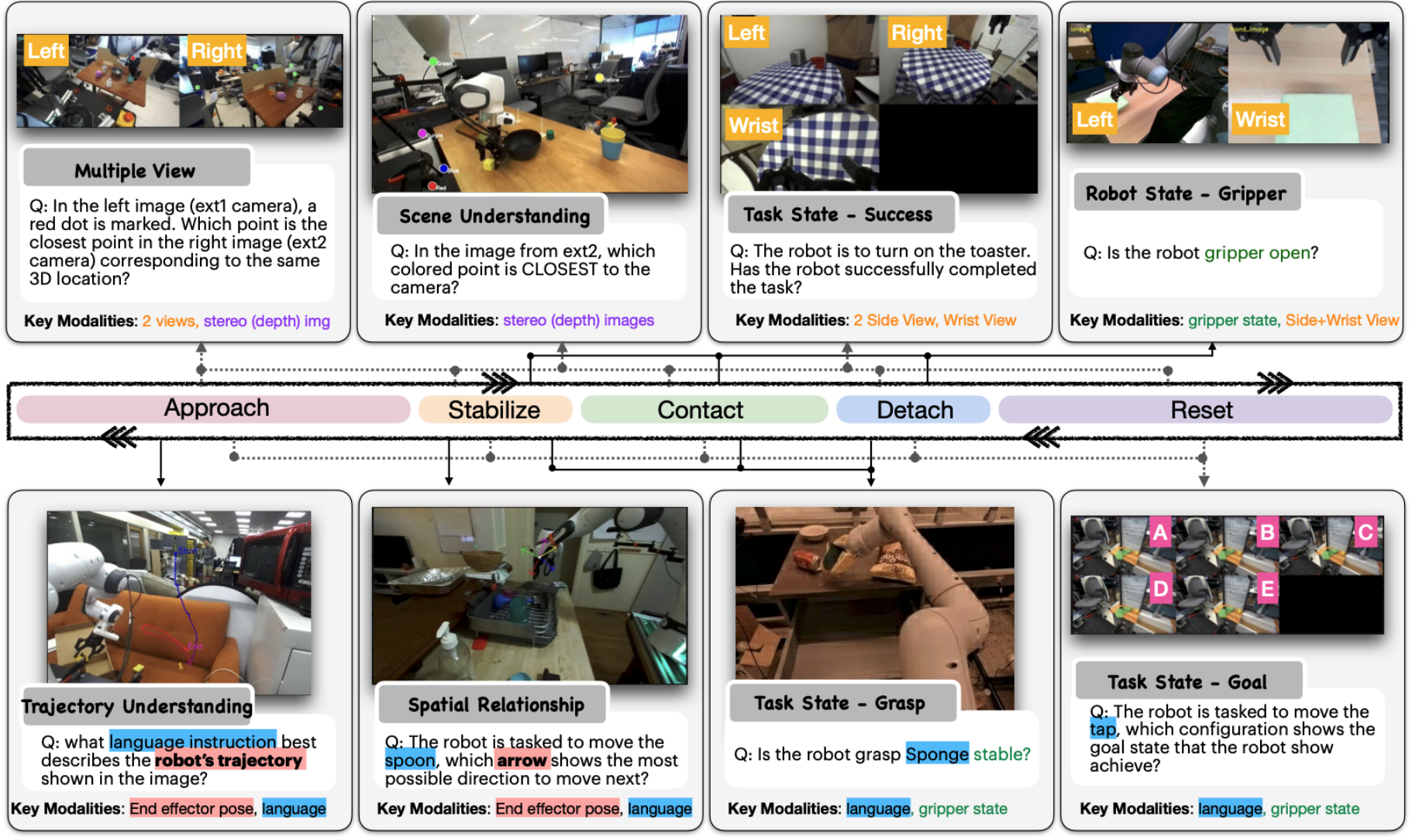 Robo2VLM: Visual Question Answering from Large-Scale In-the-Wild Robot Manipulation DatasetsIn Thirty-ninth Annual Conference on Neural Information Processing Systems (NeurIPS), 2025Spotlight
Robo2VLM: Visual Question Answering from Large-Scale In-the-Wild Robot Manipulation DatasetsIn Thirty-ninth Annual Conference on Neural Information Processing Systems (NeurIPS), 2025Spotlight -
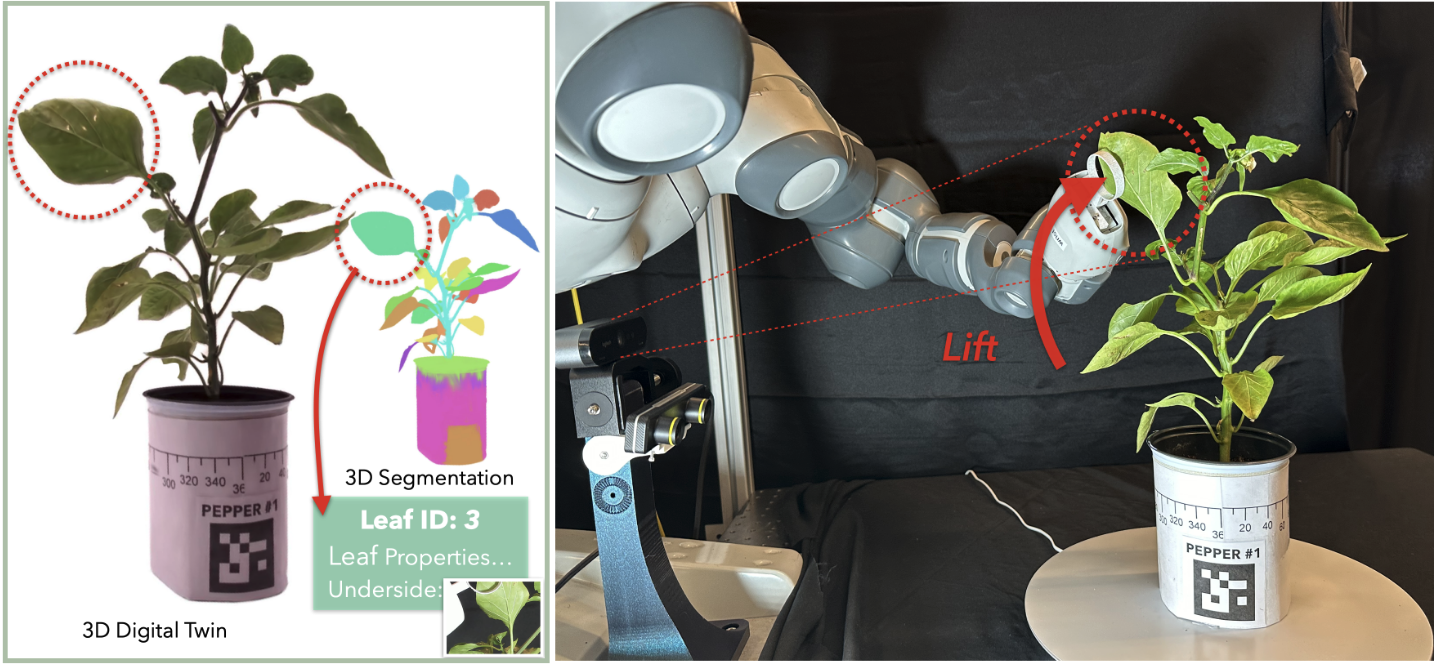 Botanybot : Digital Twin Monitoring of Occluded and Underleaf Plant Structures with Gaussian SplatsIn IROS, 2025
Botanybot : Digital Twin Monitoring of Occluded and Underleaf Plant Structures with Gaussian SplatsIn IROS, 2025 -
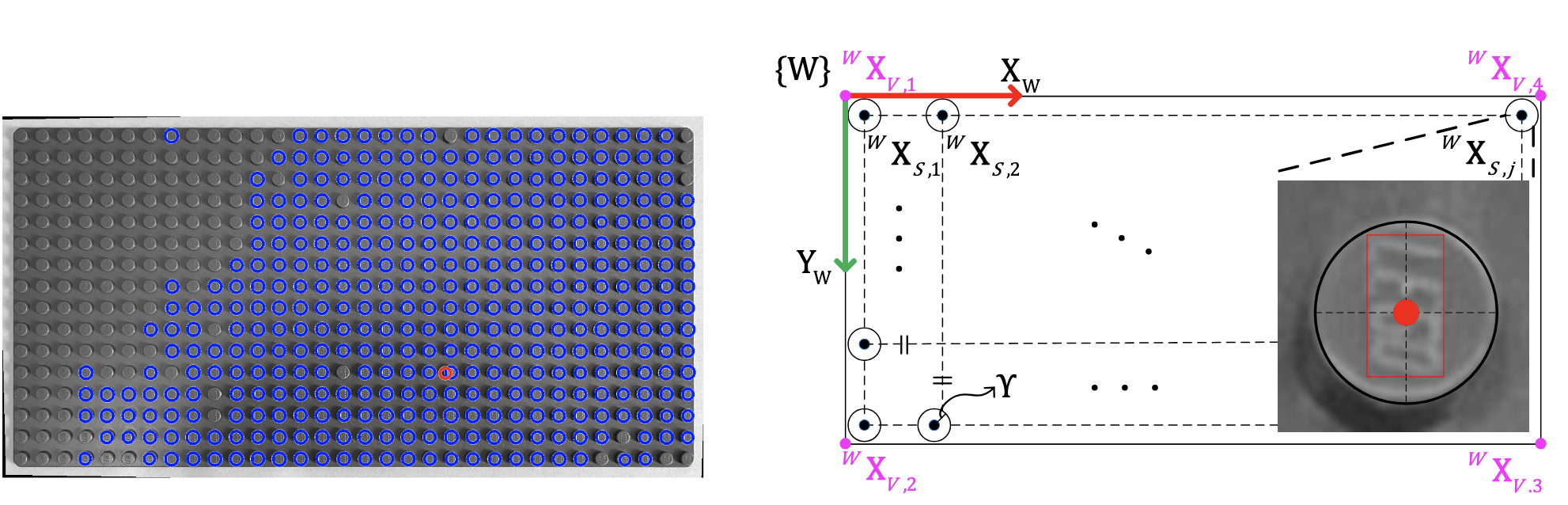 Vision-based Camera/Robot Pose Estimation using Both Semantic and Geometric Features on LEGO BaseplatesIEEE International Conference on Automation Science and Engineering (CASE), 2023
Vision-based Camera/Robot Pose Estimation using Both Semantic and Geometric Features on LEGO BaseplatesIEEE International Conference on Automation Science and Engineering (CASE), 2023 -
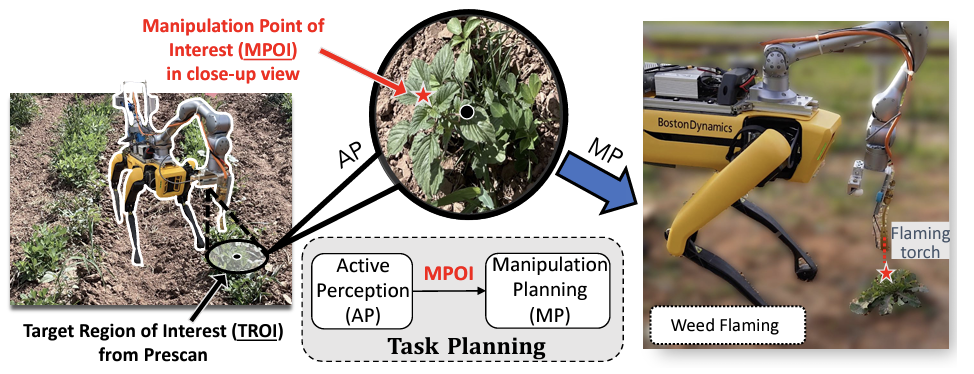 Coupled Active Perception and Manipulation Planning for a Mobile Manipulator in Precision Agriculture ApplicationsInternational Conference on Robotics and Automation (ICRA), 2024
Coupled Active Perception and Manipulation Planning for a Mobile Manipulator in Precision Agriculture ApplicationsInternational Conference on Robotics and Automation (ICRA), 2024 -
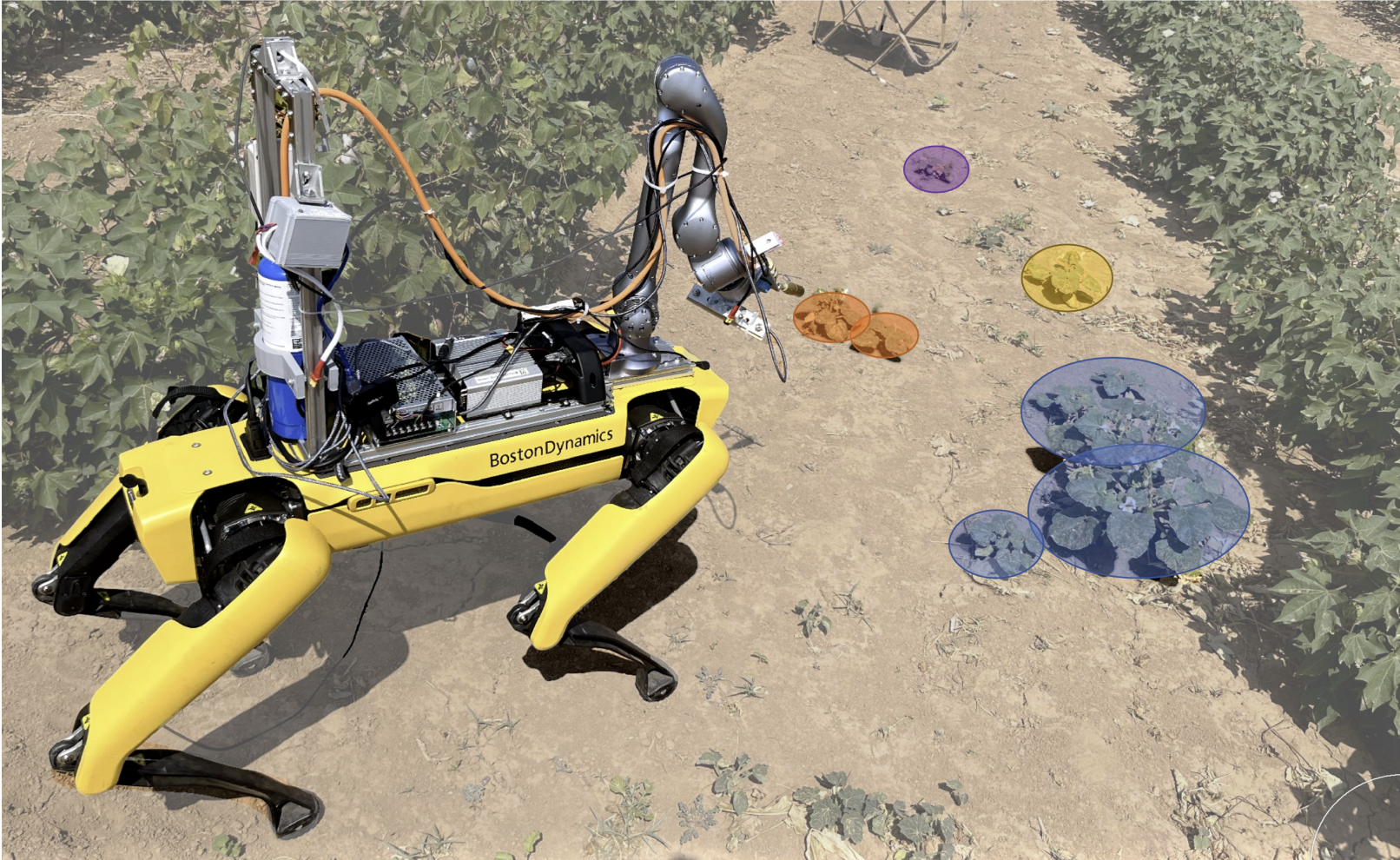
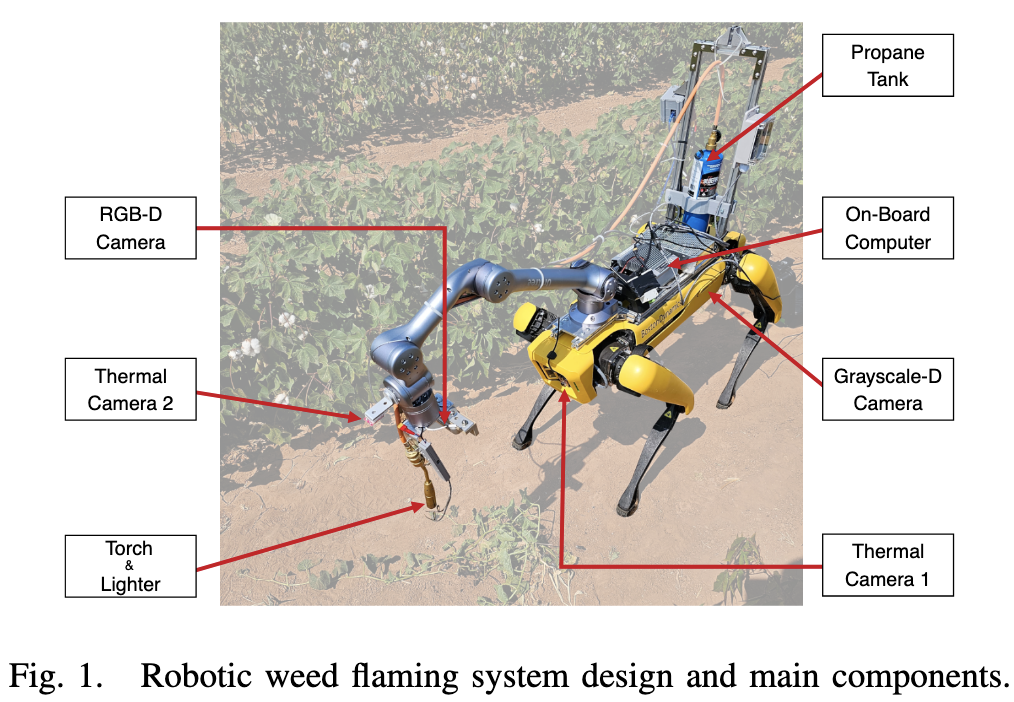 System and Algorithm for Robotic Weed Flaming Using a Quadruped Robot and a 6-Axis ManipulatorInternational Conference on Intelligent Robots and Systems (IROS), 2024
System and Algorithm for Robotic Weed Flaming Using a Quadruped Robot and a 6-Axis ManipulatorInternational Conference on Intelligent Robots and Systems (IROS), 2024 -
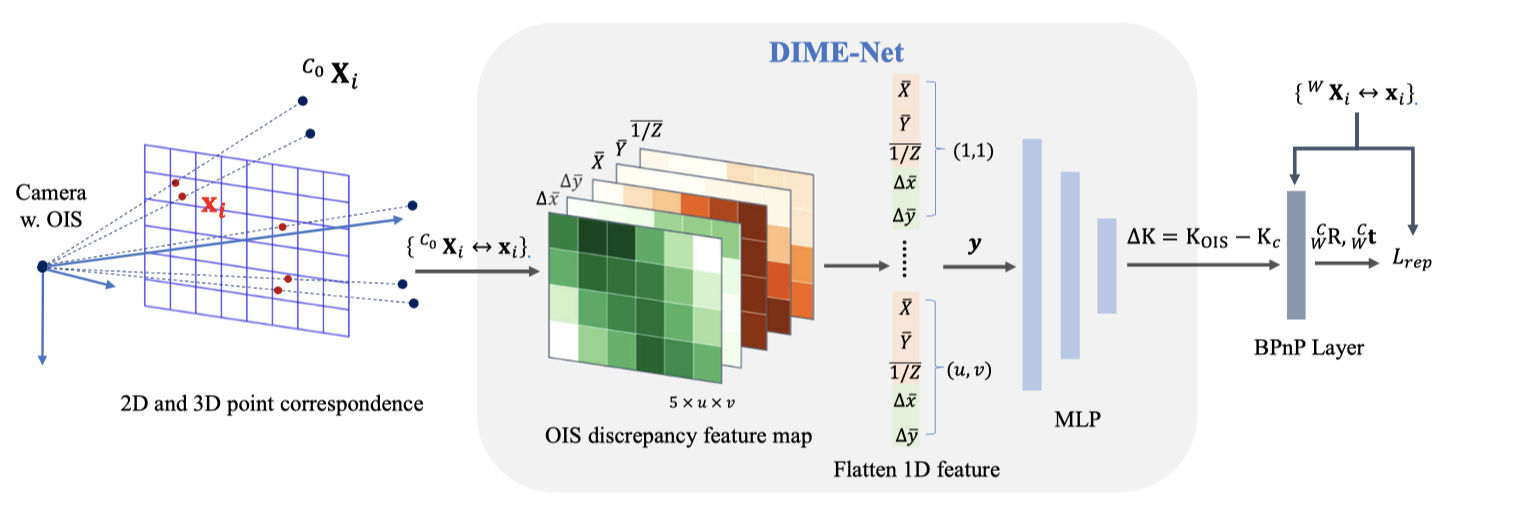 Dynamic Intrinsic Parameter Rectification Network for Cameras with Optical Image Stabilization in Desktop Augmented Reality ApplicationsIEEE International Conference on Automation Science and Engineering (CASE), 2024
Dynamic Intrinsic Parameter Rectification Network for Cameras with Optical Image Stabilization in Desktop Augmented Reality ApplicationsIEEE International Conference on Automation Science and Engineering (CASE), 2024 -
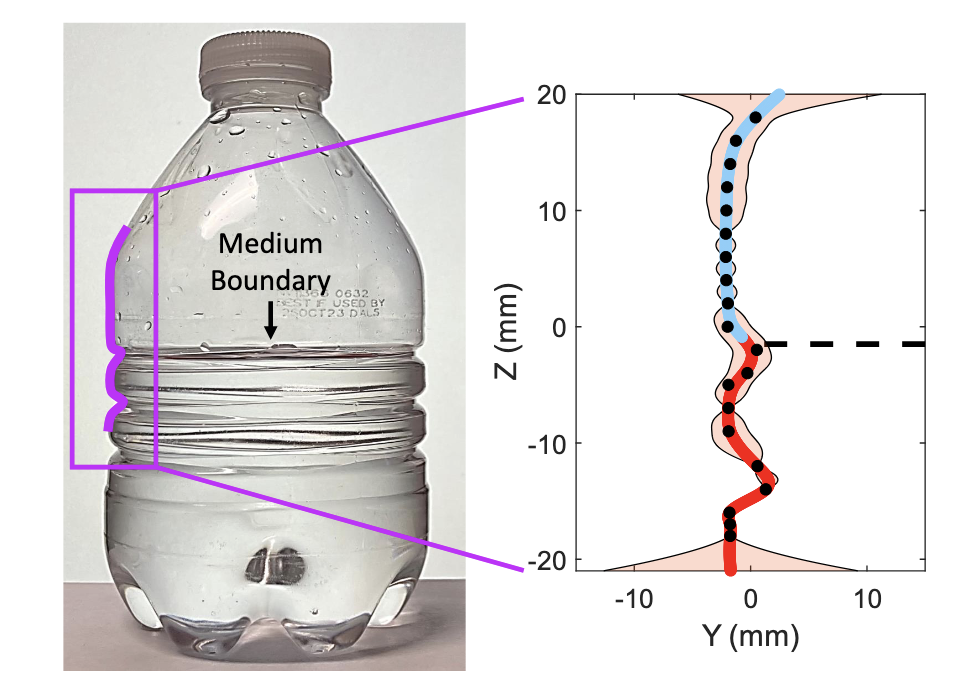 A Pretouch Perception Algorithm for Object Material and Structure Mapping to Assist Grasp and Manipulation Using a DMDSM SensorInternational Conference on Intelligent Robots and Systems (IROS), 2023
A Pretouch Perception Algorithm for Object Material and Structure Mapping to Assist Grasp and Manipulation Using a DMDSM SensorInternational Conference on Intelligent Robots and Systems (IROS), 2023 -
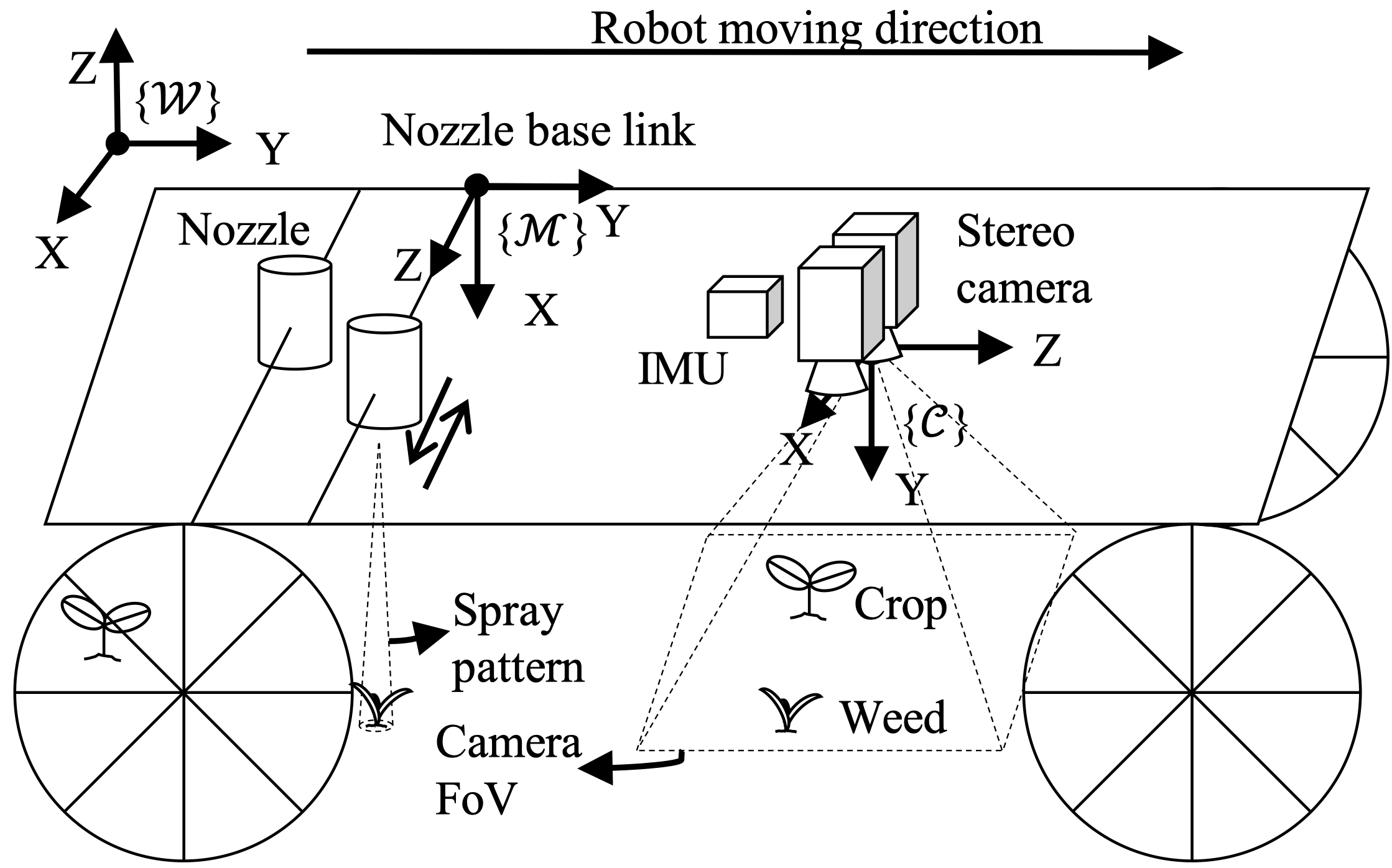 Algorithm and System Development for Robotic Micro-Volume Herbicide Spray Towards Precision Weed ManagementIEEE Robotics and Automation Letters, 2022
Algorithm and System Development for Robotic Micro-Volume Herbicide Spray Towards Precision Weed ManagementIEEE Robotics and Automation Letters, 2022 -
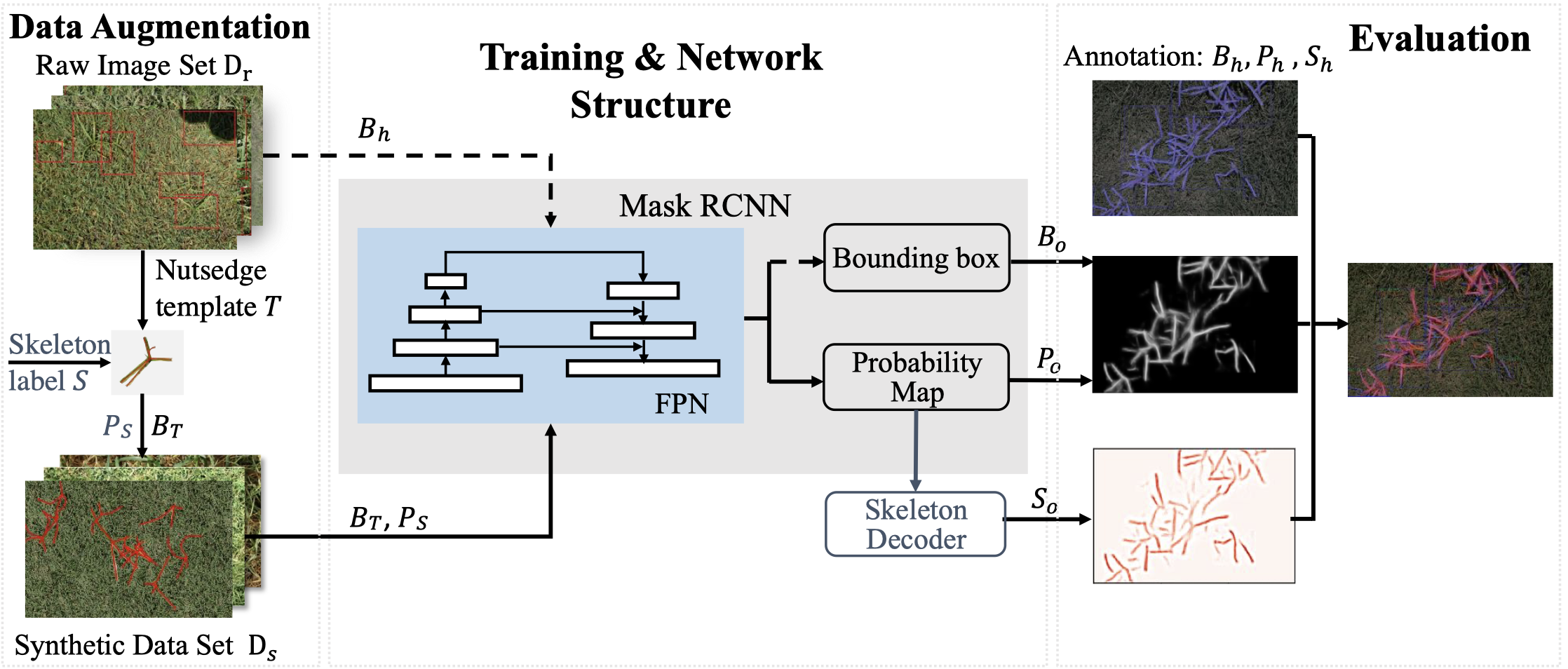 Toward Robotic Weed Control: Detection of Nutsedge Weed in Bermudagrass Turf Using Inaccurate and Insufficient Training DataIEEE Robotics and Automation Letters, 2021
Toward Robotic Weed Control: Detection of Nutsedge Weed in Bermudagrass Turf Using Inaccurate and Insufficient Training DataIEEE Robotics and Automation Letters, 2021










