Shuangyu Xie
PostDoc @ UCB, Ph.D. @ TAMU

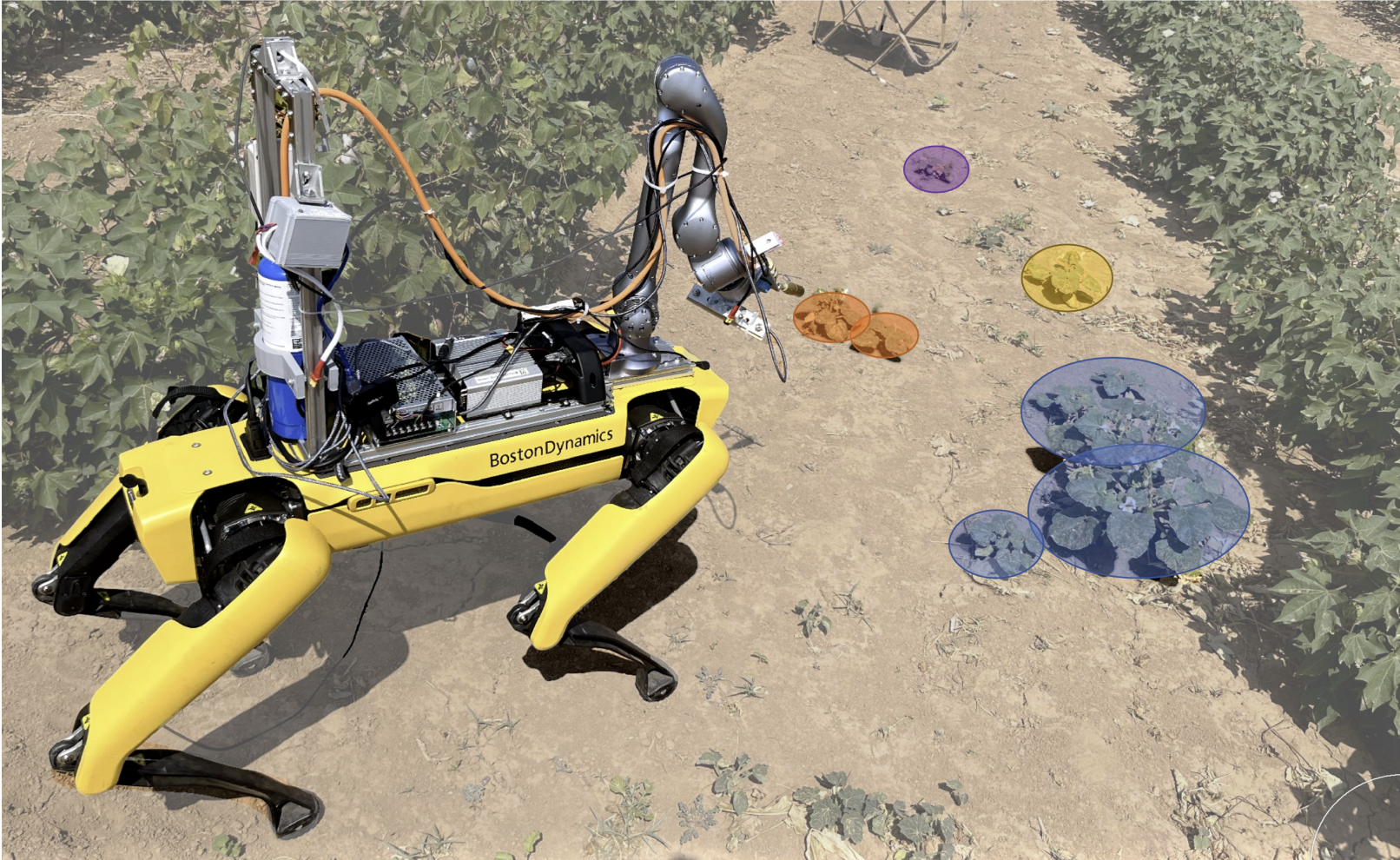
I am a Postdoctoral researcher in the AUTOLab at UC Berkeley, working with Prof. Ken Goldberg. Prior to joining UC Berkeley, I obtained my Ph.D. and M.S. degree from Texas A&M University, advised by Prof. Dezhen Song. My research aims to make robots more capable and resilient in unstructured environments, spanning applications in manipulation, mobile manipulation and agricultural robotics.
Research Highlights
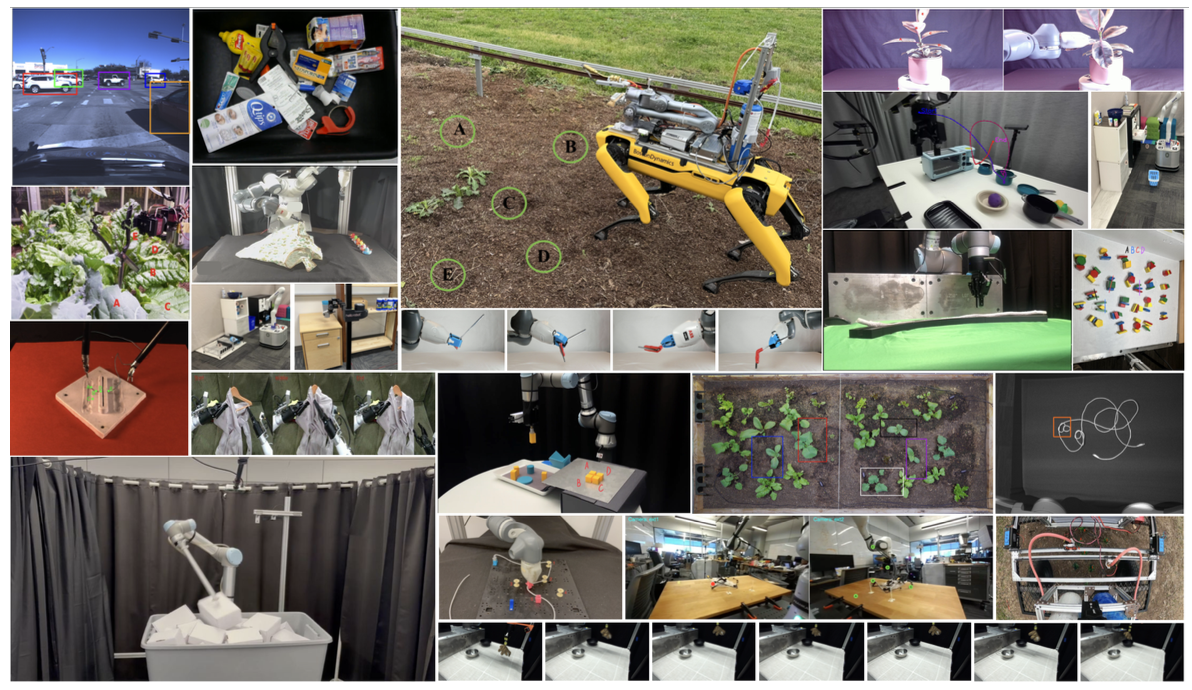
My recent work explores how Vision-Language Models and robotics can advance each other: real robot experience provides the grounded, embodied data that VLMs need, while VLMs bring the open-world semantic understanding that robots need to perceive, reason, and act. I pursue this along three threads:
- Learning VLMs from robot experience. Robo2VLM (NeurIPS 2025, Spotlight) turns large-scale, in-the-wild robot manipulation datasets into grounded visual question-answering data, using the robot’s own sensing and kinematics to supervise VLM training and evaluation.
- Evaluating VLMs for robotics. RoboVista (RSS 2026) is the first robot-at-work benchmark that evaluates VLMs across diverse real-world robot deployments—manipulation, driving, and surgical scenes—with a public leaderboard.
- Understanding and curating robot data with VLMs. RoboSQ (ICRA 2026) is a semantic query engine that uses natural language to curate high-quality, task-aligned training data from large robot datasets, and RoboSegNet (CVPR 2026) fuses vision and kinematics to segment robot trajectories into meaningful sub-tasks, zero-shot.
News
| Apr 20, 2026 | RoboVista has been accepted to RSS 2026 — the leaderboard is now online, and the benchmark is available on Hugging Face! |
|---|---|
| Feb 26, 2026 | RoboSegNet has been accepted to CVPR 2026! |
| Jan 29, 2026 | RoboSQ has been accepted to ICRA 2026! |
| Sep 20, 2025 | Robo2VLM has been accepted to NeurIPS 2025 as a Spotlight — the dataset has 29k+ downloads on Hugging Face! |
Selected Publications
* indicates co-first author
-
 RoboVista: Evaluating Vision Language Models for Diverse Robot ApplicationsIn Robotics: Science and Systems (RSS), 2026
RoboVista: Evaluating Vision Language Models for Diverse Robot ApplicationsIn Robotics: Science and Systems (RSS), 2026 -
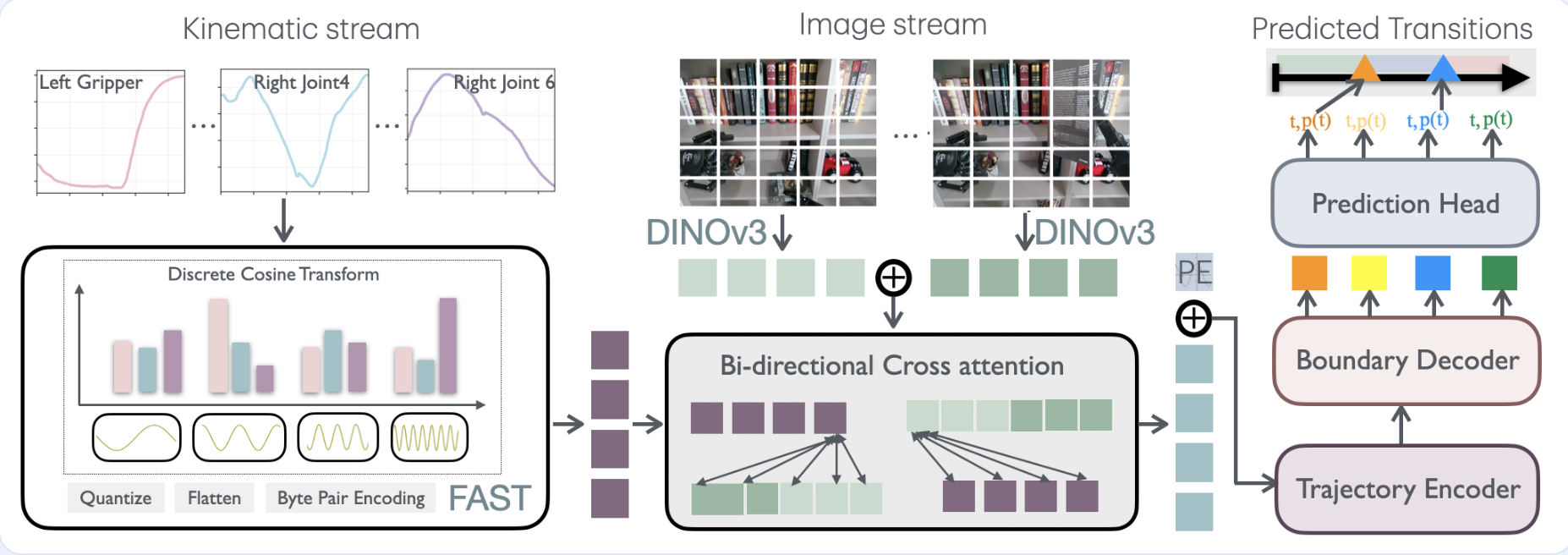 Learning Multi-Task Robot Trajectory Segmentation from Visual and Kinematic StreamsIn IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2026
Learning Multi-Task Robot Trajectory Segmentation from Visual and Kinematic StreamsIn IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2026 -
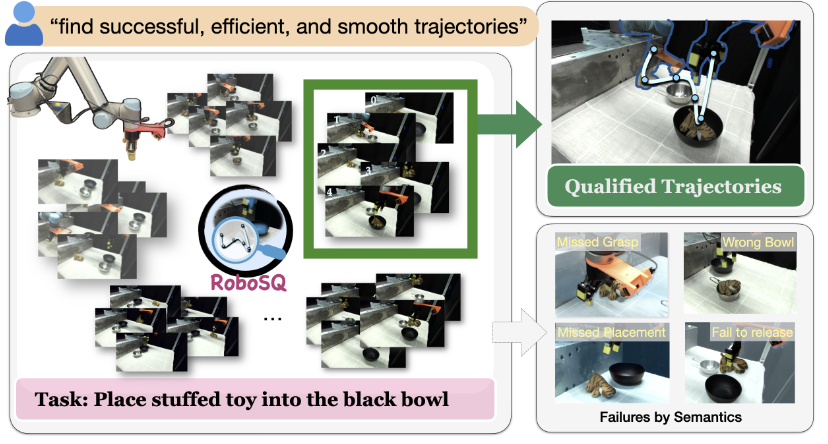 RoboSQ: Semantic Queries for Task-Aligned Robot Training DataIn IEEE International Conference on Robotics and Automation (ICRA), 2026
RoboSQ: Semantic Queries for Task-Aligned Robot Training DataIn IEEE International Conference on Robotics and Automation (ICRA), 2026 -
 Energy Efficient Planning for Repetitive Heterogeneous Tasks in Precision AgricultureIn IEEE International Conference on Robotics and Automation (ICRA), 2025
Energy Efficient Planning for Repetitive Heterogeneous Tasks in Precision AgricultureIn IEEE International Conference on Robotics and Automation (ICRA), 2025 -
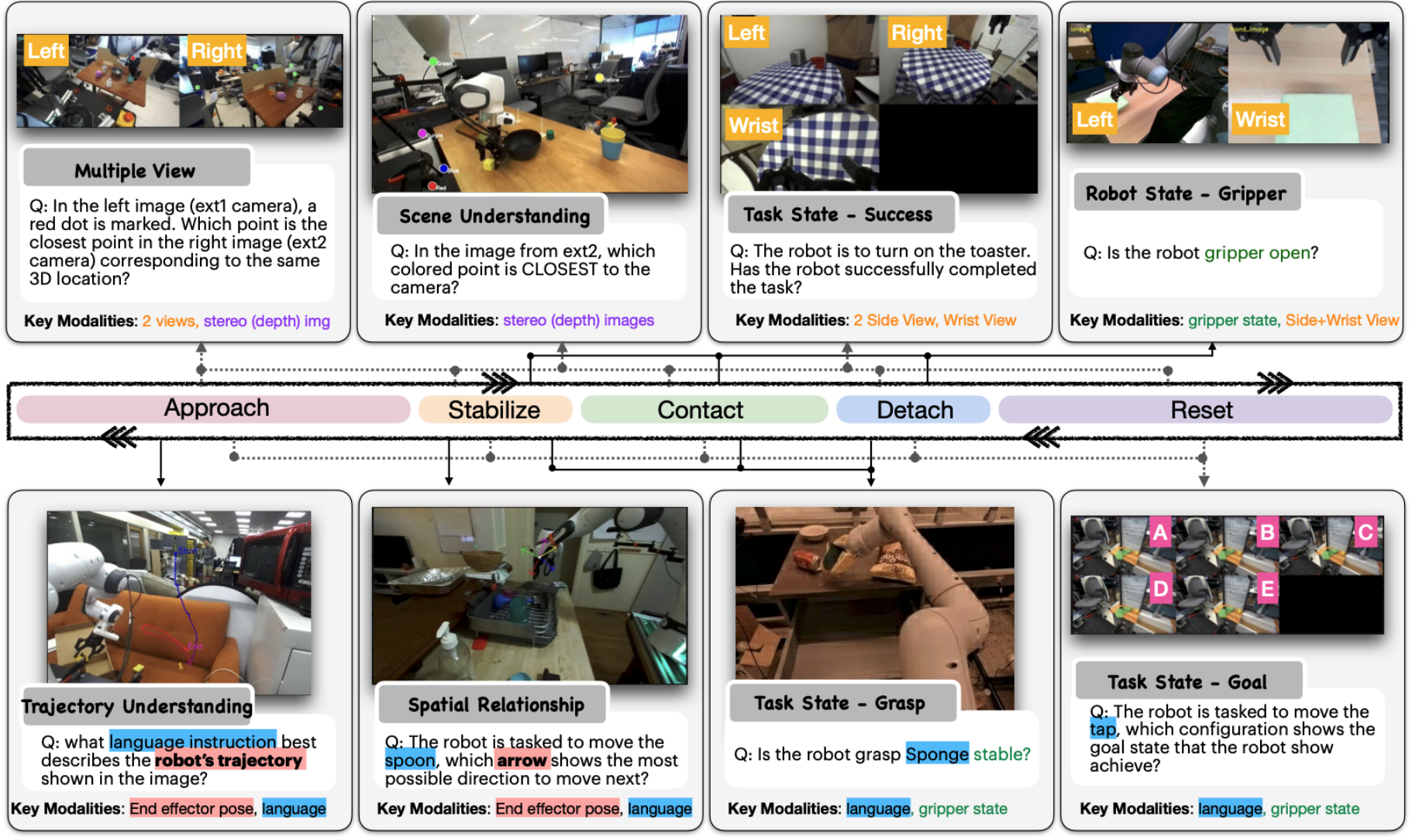 Robo2VLM: Visual Question Answering from Large-Scale In-the-Wild Robot Manipulation DatasetsIn Thirty-ninth Annual Conference on Neural Information Processing Systems (NeurIPS), 2025Spotlight
Robo2VLM: Visual Question Answering from Large-Scale In-the-Wild Robot Manipulation DatasetsIn Thirty-ninth Annual Conference on Neural Information Processing Systems (NeurIPS), 2025Spotlight -
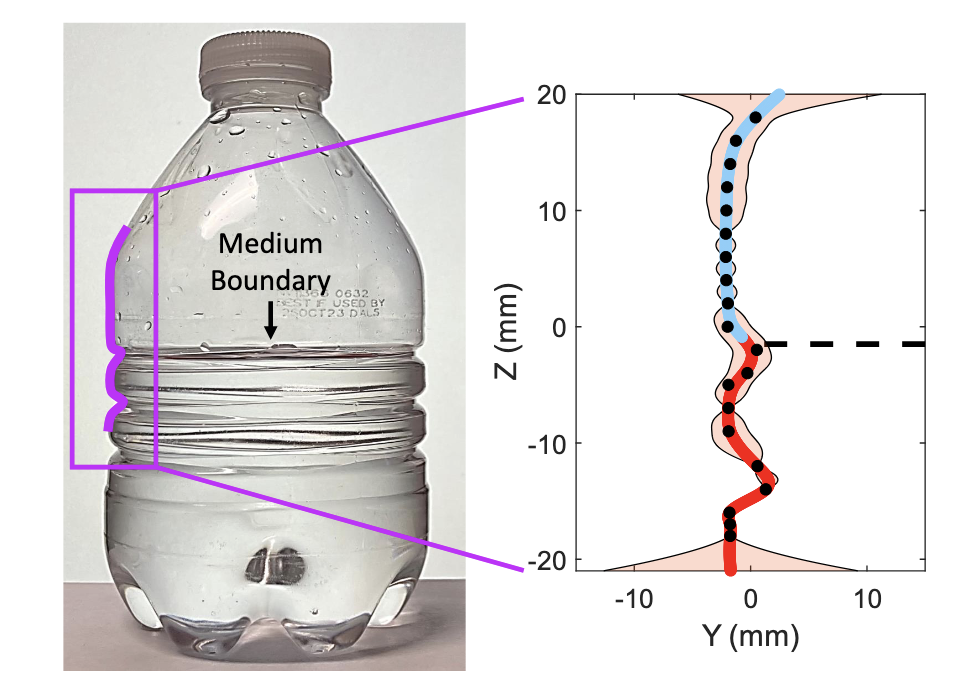
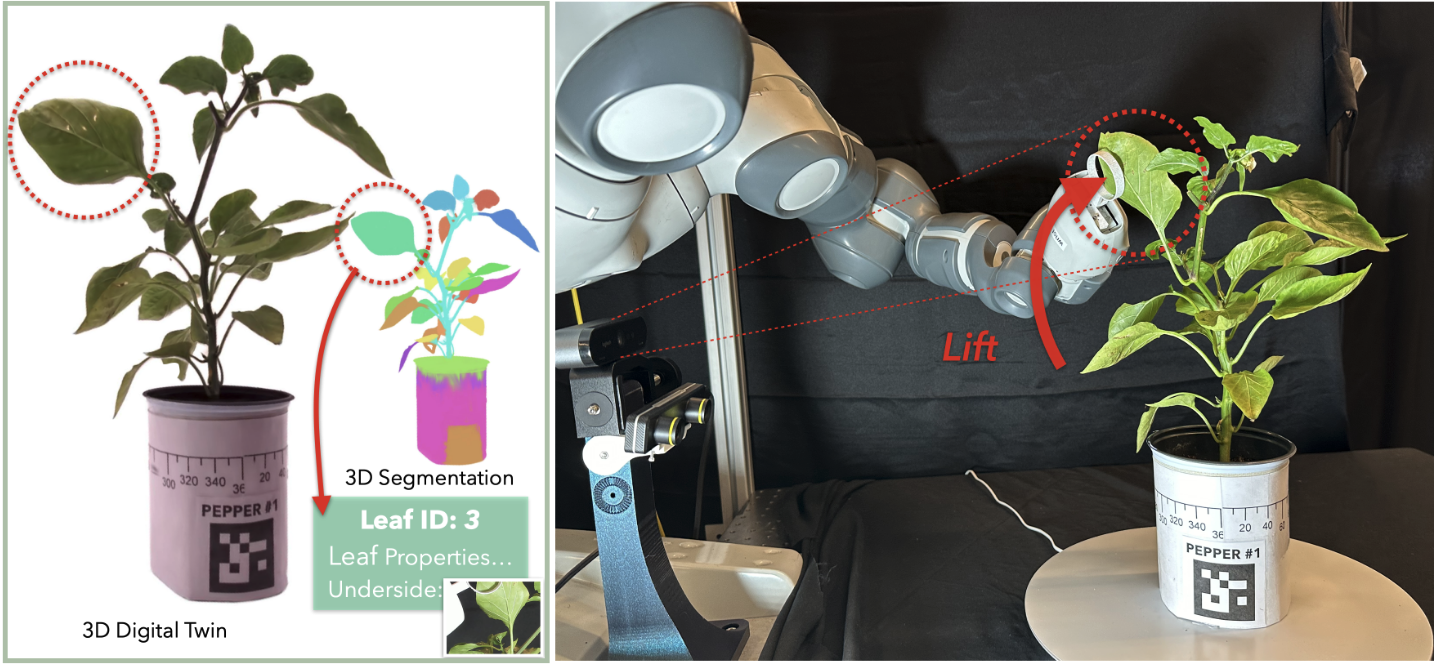 Botanybot : Digital Twin Monitoring of Occluded and Underleaf Plant Structures with Gaussian SplatsIn IROS, 2025
Botanybot : Digital Twin Monitoring of Occluded and Underleaf Plant Structures with Gaussian SplatsIn IROS, 2025 -
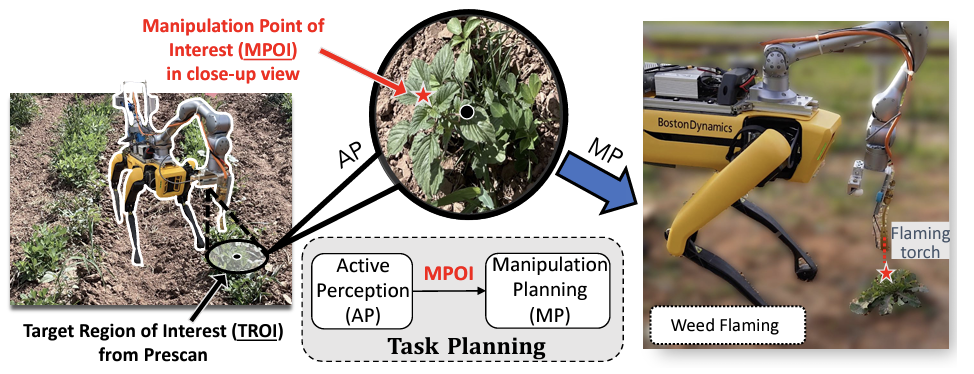 Coupled Active Perception and Manipulation Planning for a Mobile Manipulator in Precision Agriculture ApplicationsInternational Conference on Robotics and Automation (ICRA), 2024
Coupled Active Perception and Manipulation Planning for a Mobile Manipulator in Precision Agriculture ApplicationsInternational Conference on Robotics and Automation (ICRA), 2024 -
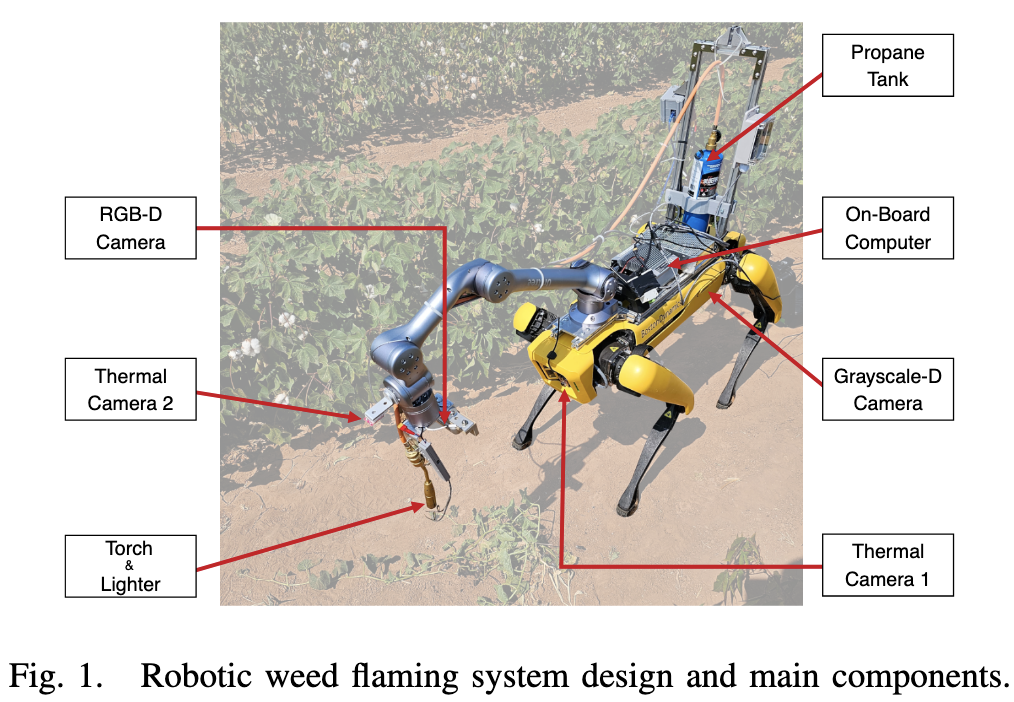 System and Algorithm for Robotic Weed Flaming Using a Quadruped Robot and a 6-Axis ManipulatorInternational Conference on Intelligent Robots and Systems (IROS), 2024
System and Algorithm for Robotic Weed Flaming Using a Quadruped Robot and a 6-Axis ManipulatorInternational Conference on Intelligent Robots and Systems (IROS), 2024 -
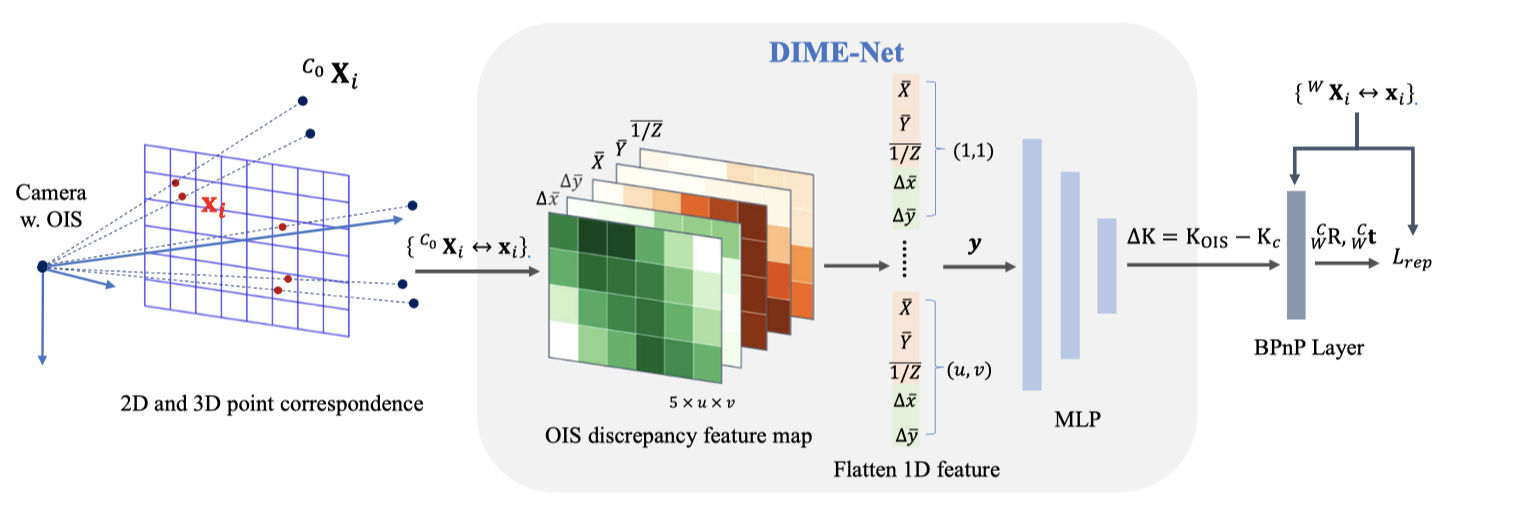 Dynamic Intrinsic Parameter Rectification Network for Cameras with Optical Image Stabilization in Desktop Augmented Reality ApplicationsIEEE International Conference on Automation Science and Engineering (CASE), 2024
Dynamic Intrinsic Parameter Rectification Network for Cameras with Optical Image Stabilization in Desktop Augmented Reality ApplicationsIEEE International Conference on Automation Science and Engineering (CASE), 2024 -
 A Pretouch Perception Algorithm for Object Material and Structure Mapping to Assist Grasp and Manipulation Using a DMDSM SensorInternational Conference on Intelligent Robots and Systems (IROS), 2023
A Pretouch Perception Algorithm for Object Material and Structure Mapping to Assist Grasp and Manipulation Using a DMDSM SensorInternational Conference on Intelligent Robots and Systems (IROS), 2023 -
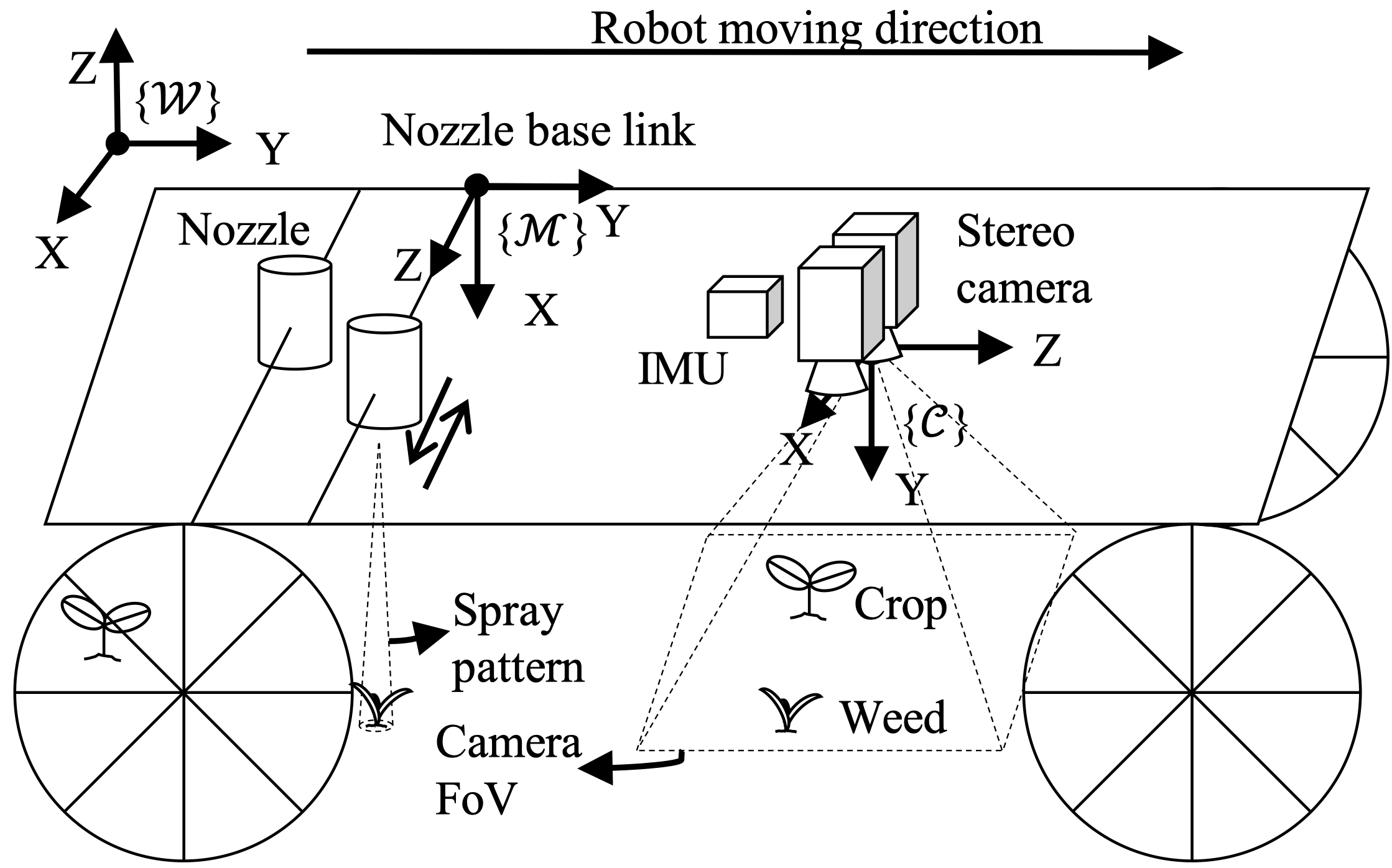 Algorithm and System Development for Robotic Micro-Volume Herbicide Spray Towards Precision Weed ManagementIEEE Robotics and Automation Letters, 2022
Algorithm and System Development for Robotic Micro-Volume Herbicide Spray Towards Precision Weed ManagementIEEE Robotics and Automation Letters, 2022 -
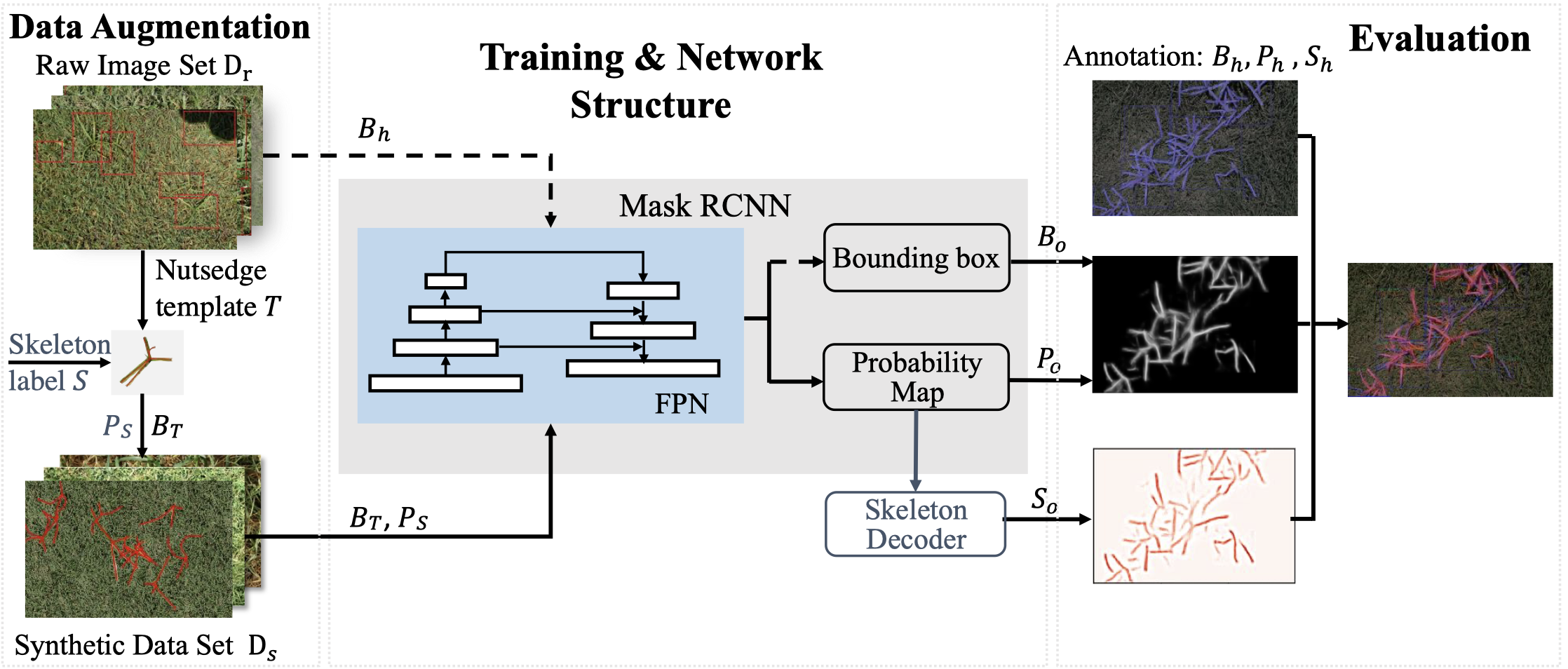 Toward Robotic Weed Control: Detection of Nutsedge Weed in Bermudagrass Turf Using Inaccurate and Insufficient Training DataIEEE Robotics and Automation Letters, 2021
Toward Robotic Weed Control: Detection of Nutsedge Weed in Bermudagrass Turf Using Inaccurate and Insufficient Training DataIEEE Robotics and Automation Letters, 2021











